
From Spaceframe to Autonomous Racer – With the OMS Race at the Core
How the University of Seville’s Formula Student team used the OMS Race to simplify their state estimator, dramatically improve accuracy, and bring their autonomous race car to life – all under extreme time pressure.
The Challenge: Three Years of Development, Almost No Track Time
ARUS Andalucía Racing is the Formula Student team at the University of Seville – over 100 engineering students who design, manufacture, and race a high-performance electric car every season. The 2024–2025 season was the culmination of a multi-year development push: in just three years, the team went from a tubular spaceframe with rear-wheel drive to a full carbon fiber monocoque with four in-wheel motors and a complete autonomous racing system.
Running that kind of vehicle demands precise real-time state estimation. The controls department needs accurate longitudinal and lateral velocity as well as yaw rate to keep the SLAM-based localization and trajectory tracking (following a planned path at the correct speed profile) working reliably in Driverless mode. The same data feeds the torque vectoring system, which distributes power across all four in-wheel motors to maximize grip at each tire.
The problem: this season was brutally time-constrained. Technical challenges ate into the development schedule, and on-track testing was extremely limited. The team needed a state estimation solution that would work reliably from day one – without weeks of calibration and tuning.
The Previous Approach: Complex, Model-Dependent, Fragile
Before the OMS Race, the team’s state estimator was built around an IMU, a steering angle sensor, the four in-wheel motor encoders, and a Kalman filter using a linearized bicycle model. The key differentiator in their approach was an inverse tire model: by estimating tire forces and then back-calculating slip ratios and tire slip angles, the algorithm derived wheel-level velocity components in both the longitudinal and lateral directions.
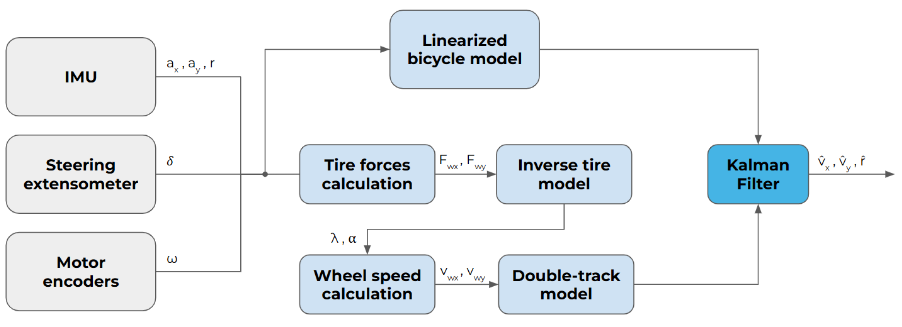
State estimation algorithm without the OMS Race ground speed sensor (GSS).
On paper, the approach had potential. In practice, it was fundamentally limited by the accuracy of the tire model – which needs to be fitted against test data that faithfully represents the actual tire-road interaction. With surface conditions constantly changing on track, the model was never quite right. The result: a standard deviation of 0.81 m/s in longitudinal velocity and 0.52 m/s in lateral velocity. Under high-slip conditions – exactly when accurate data matters most – the estimates became unreliable.
The Solution: OMS Race – Simpler, Faster, More Accurate
Integrating the OMS Race fundamentally changed the estimation architecture. The optical sensor provides non-contact, slip-independent measurements of longitudinal and lateral vehicle velocity as well as the vehicle body slip angle – at up to 1,000 Hz, fused with data from its own integrated IMU.
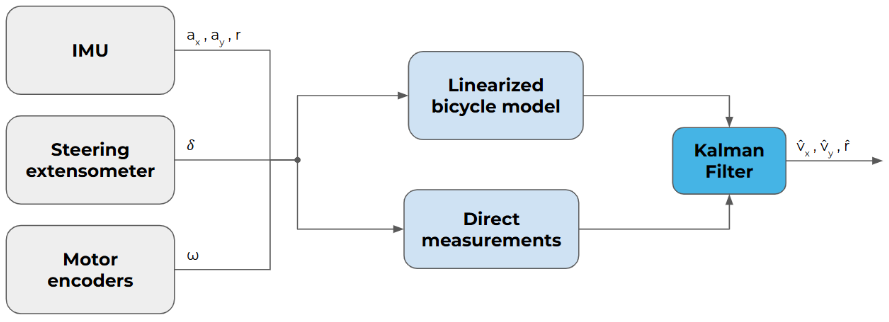
Simplified state estimation algorithm with the OMS Race ground speed sensor (GSS).
The most significant impact: the entire inverse tire model branch could be eliminated from the algorithm. Instead of relying on model-based back-calculations that are sensitive to surface conditions, the Kalman filter now ingests direct optical velocity measurements from the OMS Race. The result is a simpler, more robust estimator that delivers reliable data regardless of tire condition or road surface.
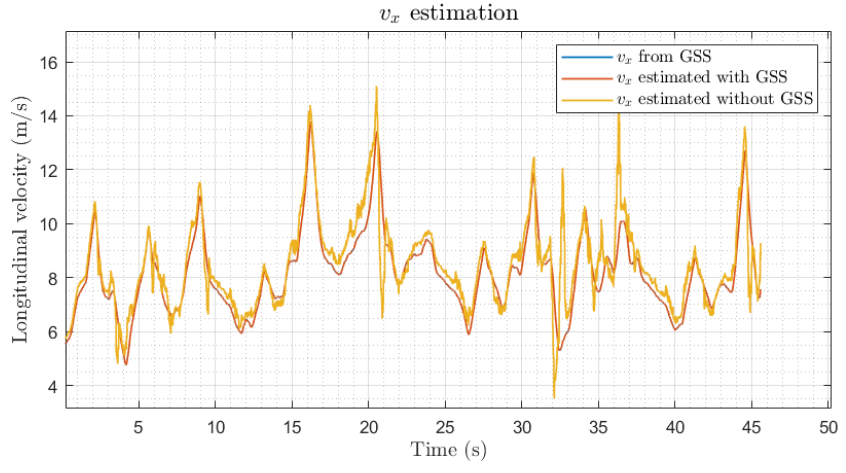
Longitudinal velocity: OMS Race reference vs. estimation with and without OMS Race
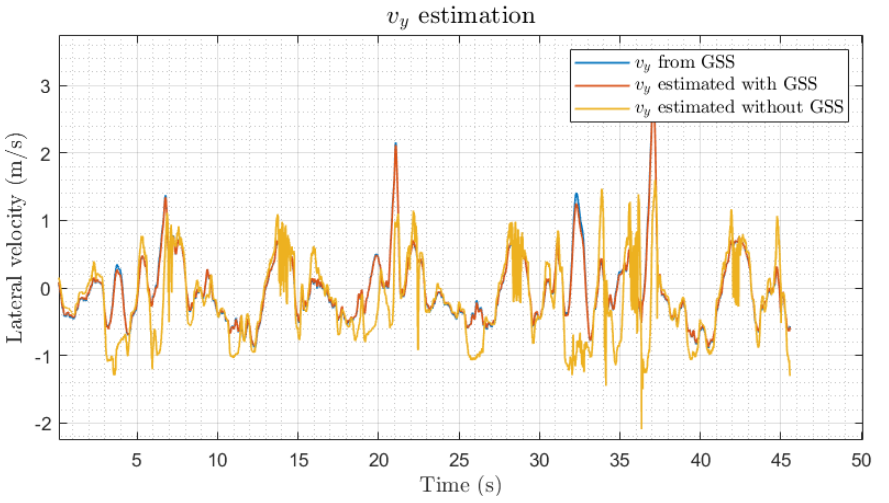
Lateral velocity: OMS Race reference vs. estimation with and without OMS Race.
Integration: Quick, Compact, Aero-Neutral
The team mounted the sensor behind the left-side tunnel of the ART-25D – a location with zero aerodynamic impact. The OMS Race simply needs to be perpendicular to the ground and within its working height range; no other mounting constraints apply.

OMS Race installation behind the left-side tunnel of the ART-25D.
The sensor’s Point of Interest feature proved especially valuable: it automatically converts all measurements to any reference point on the vehicle – in this case the center of gravity. Combined with automatic mounting angle detection, there’s no post-processing required. The data comes out of the sensor ready to use.
The team also appreciated the flexible CAN configuration. Output rate and signal selection are fully configurable, and the system estimates the resulting bus load upfront – a critical feature for ARUS, whose increasingly complex vehicle architecture was already pushing CAN bus capacity to its limits.
The Bottom Line: Reliable Data When Time Is Short
The OMS Race allowed ARUS to build a reliable state estimation pipeline in a season where every testing hour counted. Accurate velocity data enabled rapid controls tuning and powered the entire autonomous racing stack – from SLAM-based localization to trajectory tracking.
Beyond race performance, the sensor helped the team validate the design and manufacturing of their car – insights that directly inform next season’s architecture decisions and production methods.
“The integration of the OMS Race ground speed sensor allowed us to improve our state estimation accuracy and stability with minimum effort during a season where testing and development time was critical for the team’s success. We highly recommend the OMS Race Sensor to any Formula Student team looking to enhance their state estimation both for data analysis and real-time applications.”
– José Manuel Landero Plaza, Head of Control, ARUS Andalucía Racing
Key Takeaways
- Slip-independent optical measurement of longitudinal and lateral velocity at up to 1,000 Hz
- Inverse tire model completely eliminated from estimation algorithm – simpler, more robust architecture
- Previous estimation error: 0.81 m/s (longitudinal) and 0.52 m/s (lateral) standard deviation – drastically reduced with OMS Race
- Enabled successful autonomous racing operation including SLAM localization and trajectory tracking
- Optimized torque distribution across four in-wheel motors using accurate real-time velocity data
- Seamless integration: POI conversion, automatic mounting angle detection, flexible CAN configuration
- Aero-neutral mounting behind the side tunnel of the carbon monocoque
Read the Full Application Report
ARUS Andalucía Racing documented their experience with the OMS Race in a detailed application report – covering the estimation algorithm architecture, comparative measurement data, and integration details.